1、控制器正面图

正面图
2、侧面1
电源 24V,0V和VGA接口可接显示器
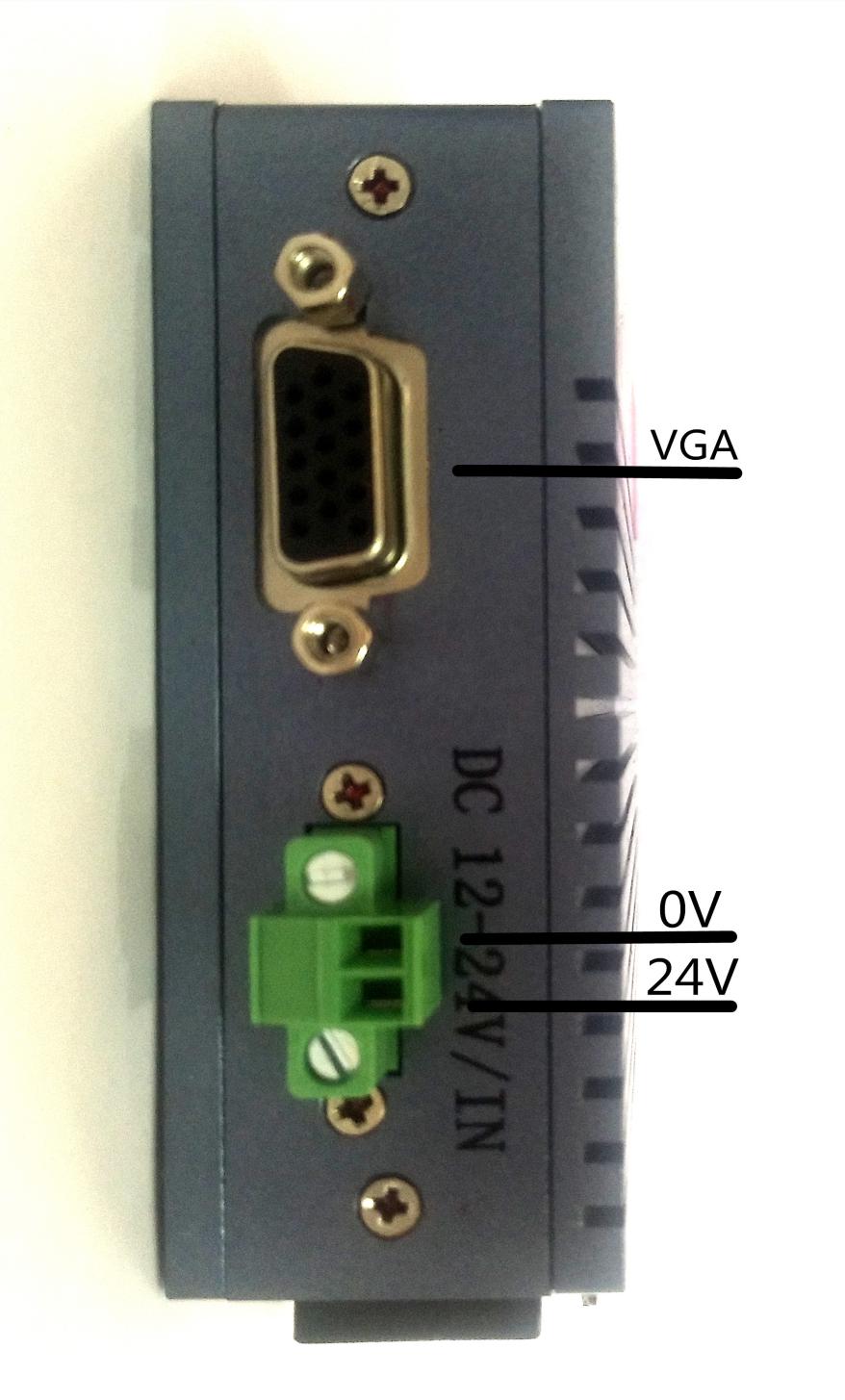
侧面图1
3、侧面图2
COM1、 COM2: RS232/485/422
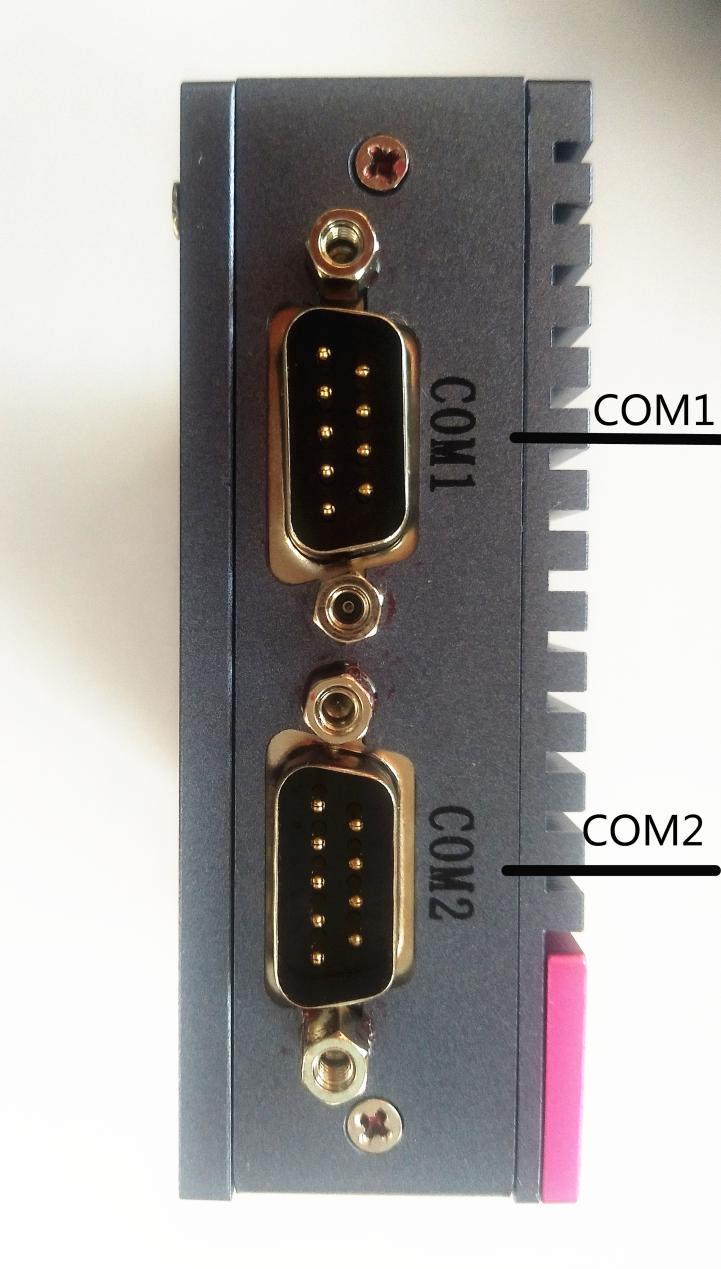 侧面图2
侧面图2
4、侧面图3
包括电源开关和电源指示灯,3个USB2.0,1个USB3.0,3个RJ45 LAN Connector-LED defi ne Giga/100MB Connector 1、USB2.0,2、USB2.0,3、USB2.0,4、3.0,5、口Ethercat, 6、口PC调试,7、口RJ45备用以太网口
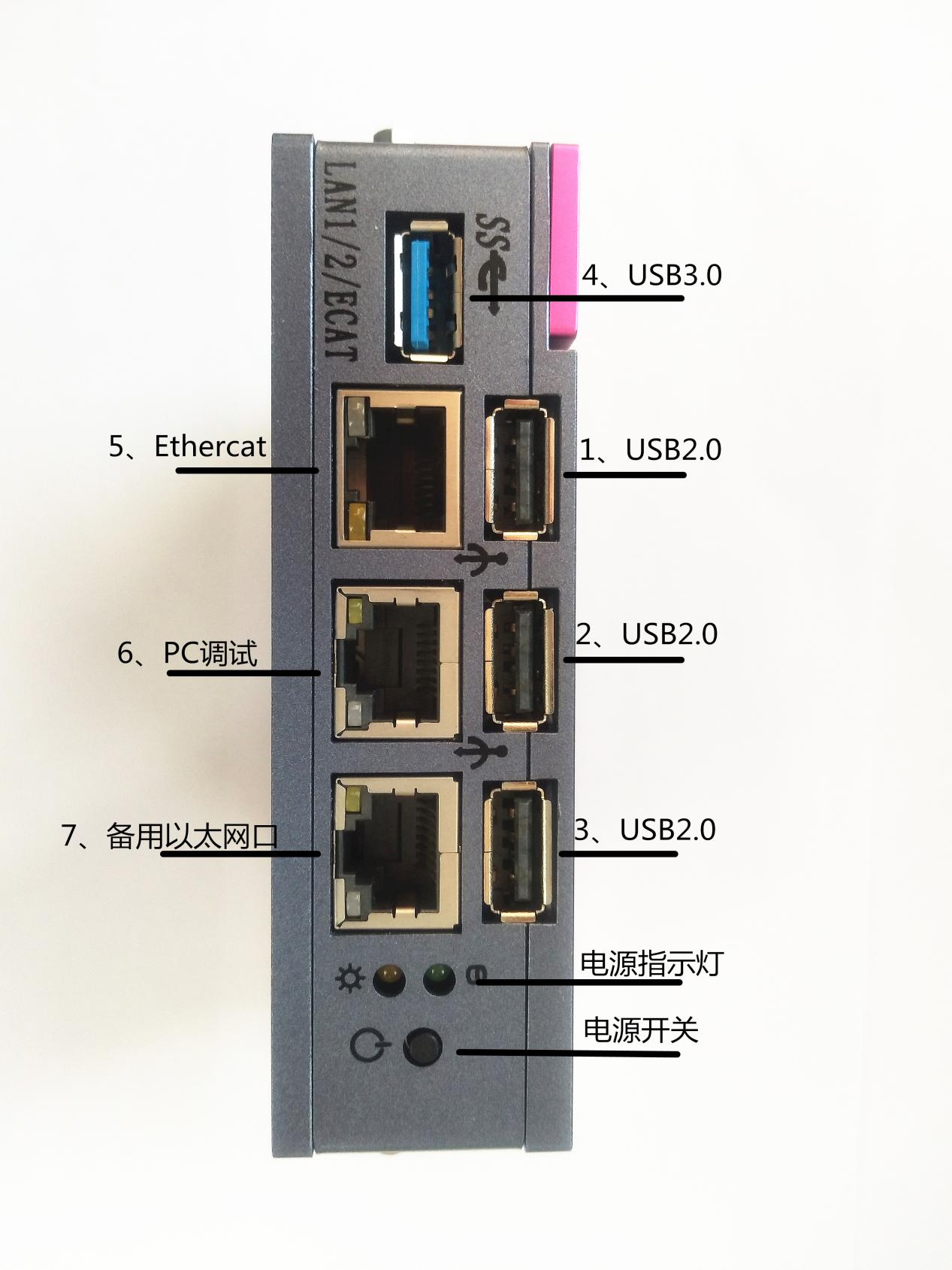
侧面图3
4、侧面图4
可卡导轨安装

侧面图4
1、运动控制系统
控制器内置codesys 系统,附带softmotion controlRTE授权key.
从单轴运动到复杂CNC控制和机器人应用,都可以实现。与传统的运动控制解决方案相反,控制器提供了一个直接集成在编程环境中的工具包,用以实现运动控制的所有功能。可实现几何数据处理、插补、运动学变换等操作。此设计使得终端用户可以在IEC61131-3标准的上位编程环境中实现复杂的CNC控制。CNC + Robotics通过典型的运动学和CNC插补器扩展了Basic的功能,CNC+Robotics为终端用户提供了一个易于使用的集成编辑器,用于配置复杂的机器人轴组。
2、功能包含内容
基础:包含用于主站和从站运动的 POU库的工具包、可视化编程模板。
运动控制和机器人控制:除了可用的一些POU库外,还包含了CNC功能的POU库,以及基于不同运动学的交换库和对应的可视化模板。
授权可拓展:多种通讯协议modbus tcp/ip、profibus等,web visu浏览器远程查看可视化界面。
3、 CNC支持功能:
(1)图形化的DIN 66025编辑器(支持G代码)。
(2)CNC库以及所有用于CNC编辑的功能块。
(4)从线性到样条插补的综合插补功能。
(5)强大的路径规划能力,包括CNC刀具半径补偿等。
(6)提供可视化模板,用于在可视化中快速方便地调试所有功能块,webvisu浏览器远程访问。
(7)丰富的可视化元素。
(8)支持虚拟轴和逻辑轴。
(9)支持多种通用总线接口的驱动程序如EtherCAT、SERCOS等。
(10)将驱动器配置为安全现场设备。
4、Robotics支持:
(1)轴组的运动学模型设置简易。
(2)具有不同坐标系的机器人坐标值的综合路径规划。
(3)支持 PLCopen Part4 标准功能块。
(4)集成多种标准的机器人模型,如例如Delta机器人,Scara机器人,Portal机器人以及各种龙门机器人(2/3/5轴)、三足机器人和SCARA机器人等。
基本技术参数
|
电源: |
24 V DC/12VDC |
|
运行电流: |
控制器四核电流230mA,二核电流210mA |
|
最大功率: |
20 W |
|
工作功率: |
8 W |
|
硬盘: |
64G(可扩展) |
|
防护等级: |
IP20 |
|
外形尺寸: |
105x85x31 mm |
环境条件
|
运行温度: |
+5 °C to +55 °C |
|
存储温度: |
-40 °C to +70 °C |
|
空气相对湿度: |
10 % to 95 % (not condensing) |
|
耐震强度: |
EN 61131-2:2007 |
内核
|
处理器 |
1、处理器英特尔赛扬J1900(2M 高速缓存,基本频率1.99GHz) 四核 |
|
|
2、处理器英特尔凌动 E3825(1M 高速缓存,基本频率1.33 GHz)双核 |
|
|
3、处理器英特尔凌动 E38452M 高速缓存,1.91 GHz |
|
不掉点电池: |
3V battery 2 片 |
|
内存: |
2G/4G |
接口
|
LAN口: |
2个,RJ45 |
|
VGA口: |
1个,9针连接器 |
|
EtherCAT口: |
1个,数据传输速率: 100/1000 Mbit/s |
|
USB: |
1个 USB 3.0 & 3个 USB 2.0 |
|
MODBUSRTU接口: |
2个可选RS485 / RS422 / RS232 (开机按F10进入BIOS设置) |

